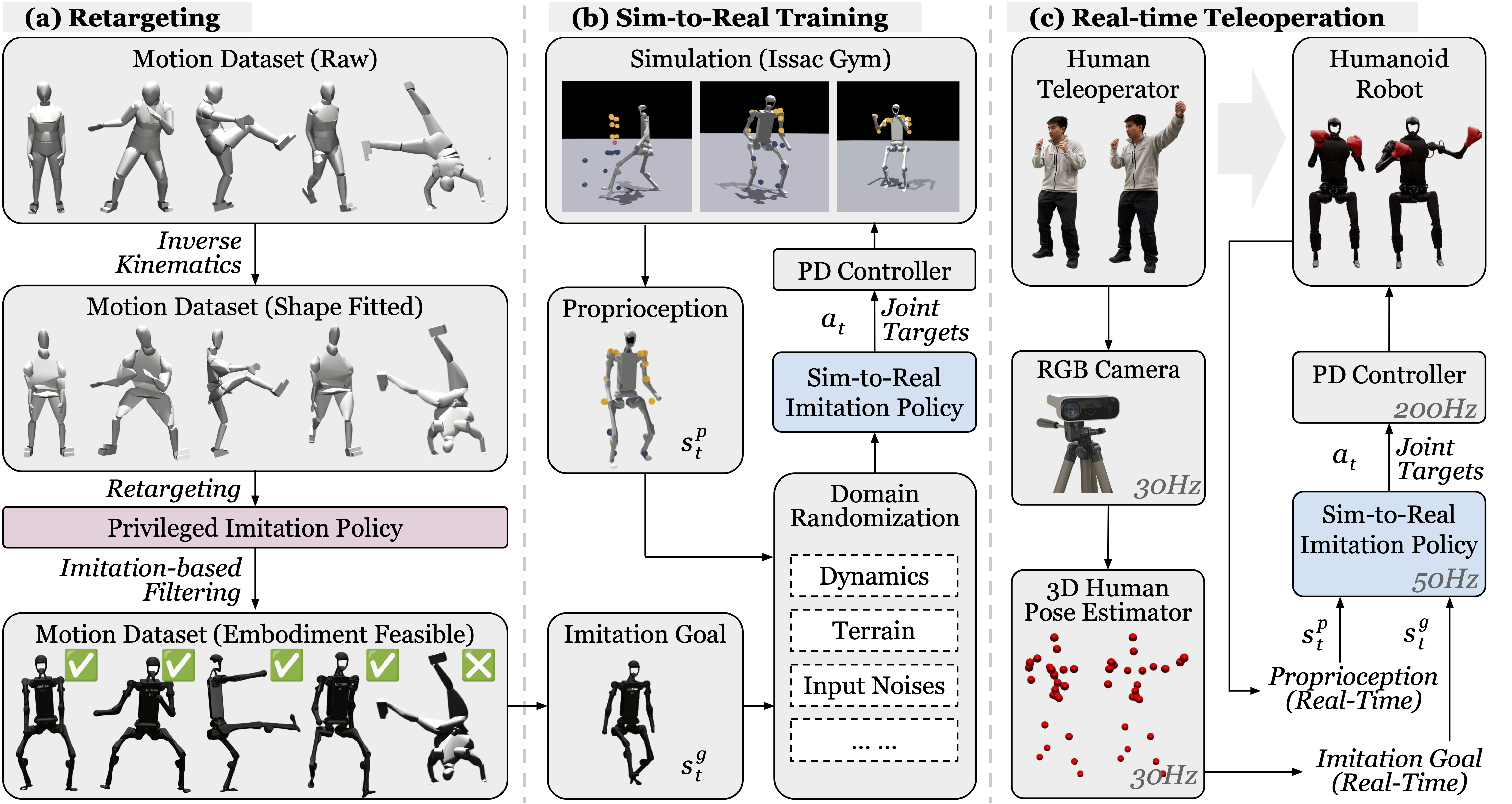
We present Human to Humanoid (H2O), a reinforcement learning (RL) based framework that enables real-time whole-body teleoperation of a full-sized humanoid robot with only an RGB camera.
To create a large-scale retargeted motion dataset of human movements for humanoid robots, we propose a scalable ''sim-to-data" process to filter and pick feasible motions using a privileged motion imitator.
Afterwards, we train a robust real-time humanoid motion imitator in simulation using these refined motions and transfer it to the real humanoid robot in a zero-shot manner.
We successfully achieve teleoperation of dynamic whole-body motions in real-world scenarios, including walking, back jumping, kicking, turning, waving, pushing, boxing, etc.
To the best of our knowledge, this is the first demonstration to achieve learning-based real-time whole-body humanoid teleoperation.